Fallo de recarga
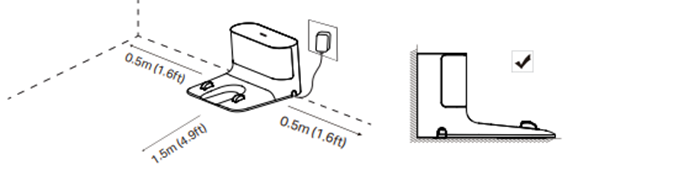
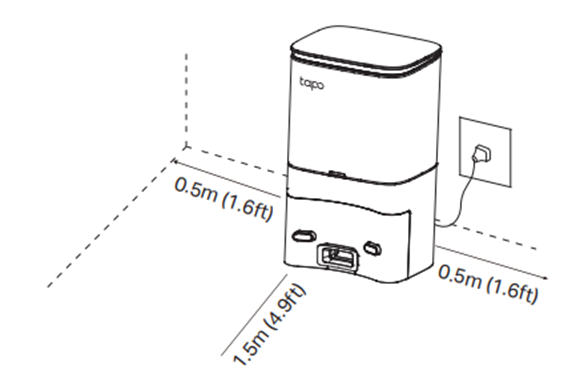
1. Compruebe la posición de la base de carga.
Coloque la base sobre una superficie nivelada, plana contra una pared, sin obstáculos a 1,5 m (4,9 pies) al frente y 0,5 m (1,6 pies) a la izquierda y a la derecha. Asegúrese de que la base de carga esté correctamente encendida.
2. Coloque el robot aspirador 1 metro frente a la base de carga. Luego inicie la función de recarga para ver si puede encontrar la base con éxito.
Este paso es para solucionar el problema, ya sea la base de carga o la falla del módulo de recarga de vacío. Si no regresa a la base de carga, envíenos un video que muestre lo que hace.
3. Se recomienda iniciar el robot aspirador desde la base de carga.
La serie RV10 utiliza el sistema de navegación inercial. Al comenzar la limpieza desde la base de carga, la ubicación de la base y la ruta de limpieza se pueden registrar mejor para mejorar la eficiencia de recarga.
4. Para la serie RV10, se recomienda no mover la aspiradora durante la limpieza.
La posición actual no se puede reposicionar después de un movimiento. Y el registro actual de ruta de limpieza se perderá, lo que resultará en una reducción de la eficiencia de recarga.
5. Verifique si el ambiente interior tiene alfombras y obstáculos como bases de ventiladores, umbrales y patas de mesas/sillas en forma de U.
La serie RV10 utiliza el sistema de navegación inercial. Si bien la altura de la barrera cruzada es de 2 cm, estos obstáculos pueden hacer que el robot suba y baje repetidamente sobre los obstáculos. Las alfombras pueden hacer que las ruedas patinen. Estos objetos pueden provocar el error de sensores como los giroscopios y causar un registro de ruta de limpieza incorrecto. Es un problema común de los modelos de sistemas de navegación inercial.


6. Cambie la posición de la base de carga y vuelva a comprobarlo.
Si los pasos anteriores no resolvieron el problema, comuníquese con el soporte de TP-Link para obtener más ayuda.